1.1 Sistemas PIV
1.2 Sistema S-PIV-3D
1.3 Como funciona?
1.4 Principais características
2 Metodologia
2.1 Calibração
2.2 Processamento
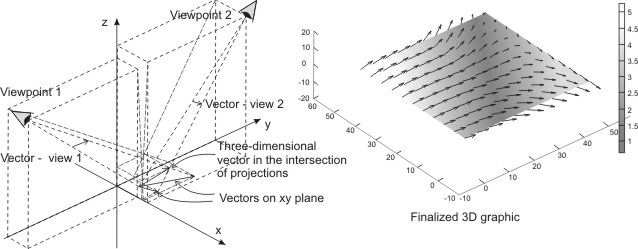
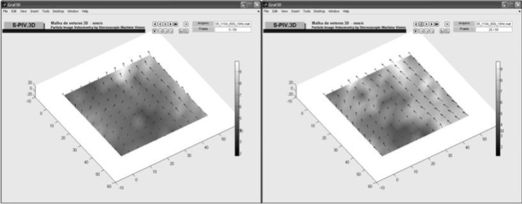
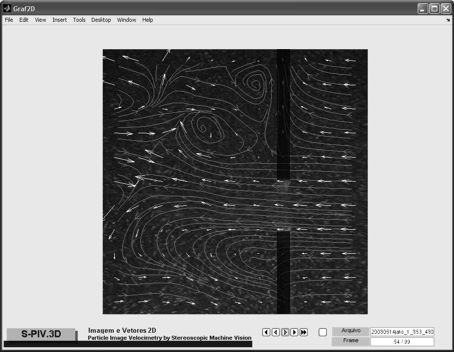
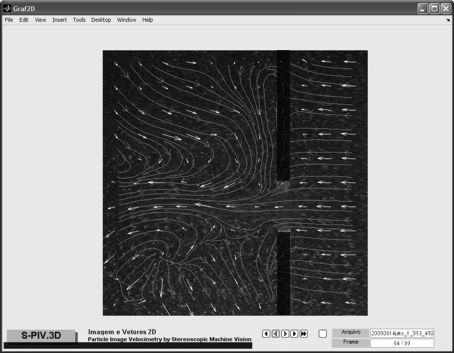
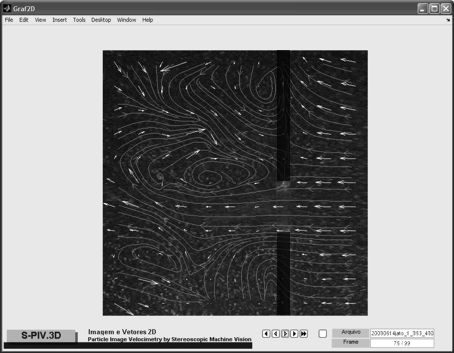
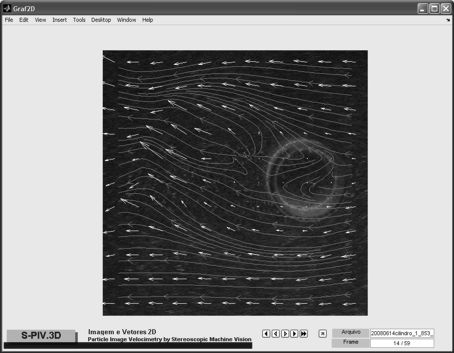
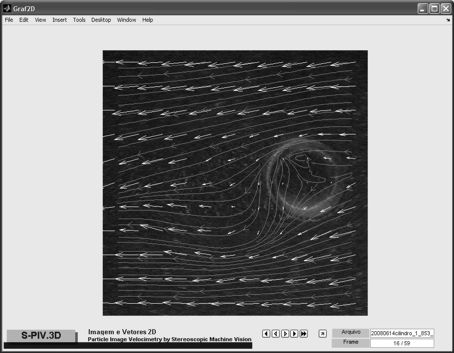
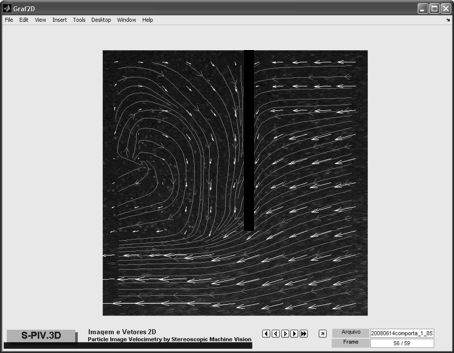
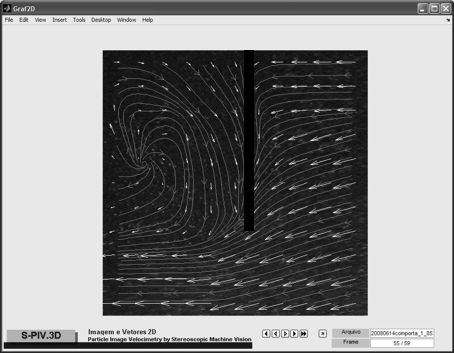
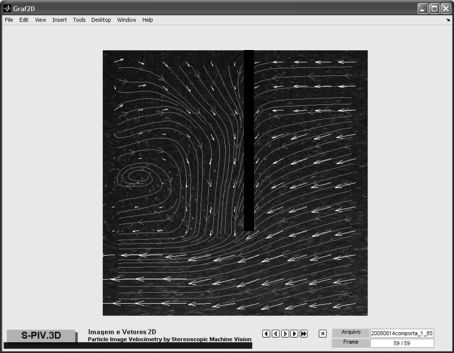
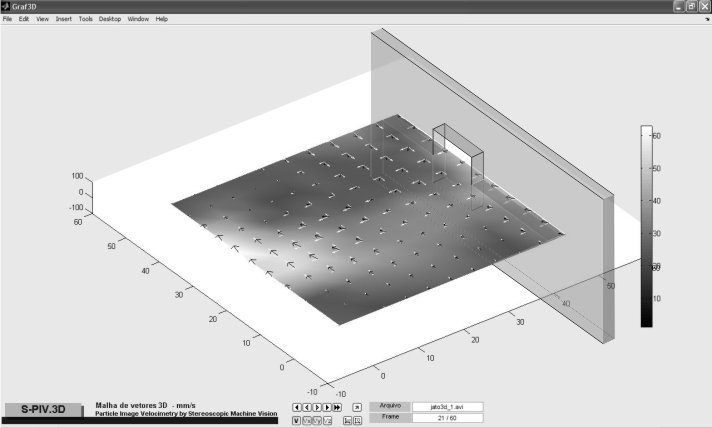
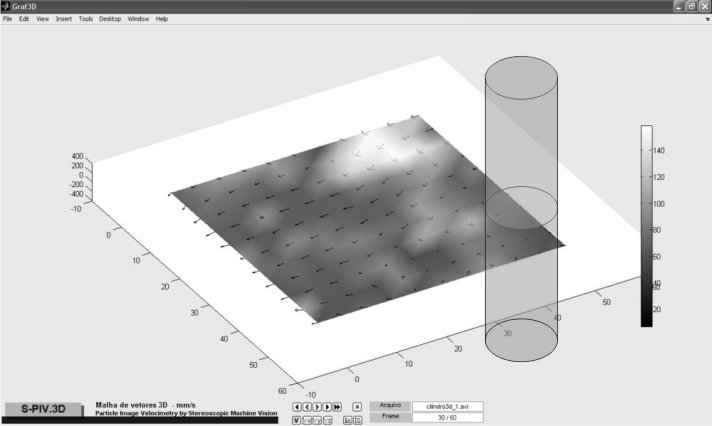
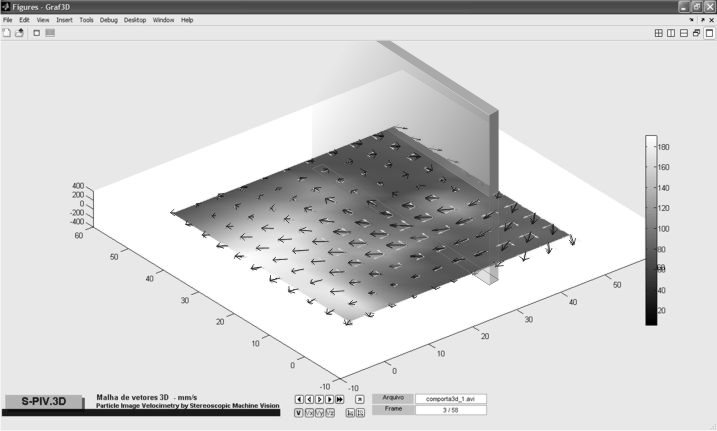
2.3 Visualização
3 Resultados
3.1 Tanque de grades
3.2 Escoamentos
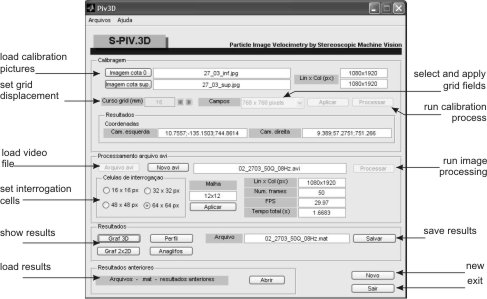
4 S-PIV-3D Software
5 Conclusões
6 Referências

1.1 Sistemas PIV
Tanto os espelhos planos quanto o prisma de faces espelhadas são elaborados por impregnação de vapor de alumínio sobre a face frontal, polimento e proteção com camada de quartzo. Os espelhos são conectados a suportes com ajuste fino de posicionamento, possibilitando a adequação da configuração geométrica da instalação para atender as necessidades de enquadramento das duas imagens no campo de aquisição.
A produção de imagens utiliza módulos de emissão laser industriais com 3mW de potência. Aparelhos de baixo custo e operação contínua, sem pulsação em sincronia com a aquisição, reduzindo drasticamente os custos de implantação do sistema. Cada módulo produz um feixe em lâmina com abertura de 90º e com espessura ajustável.
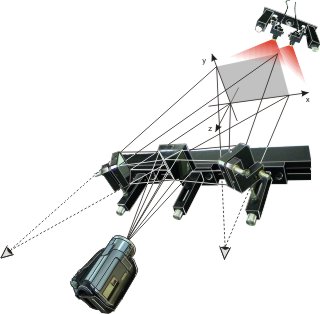
Esquema de
instalação do sistema S-PIV-3D.
O deslocamento das imagens das partículas é determinado através de técnicas PIV para a avaliação da velocidade, e para tanto, sofisticadas metodologias de pós-processamento são empregadas. Para a avaliação do campo de velocidades, um par de imagens PIV é dividido em pequenas subáreas chamadas de “áreas de interrogação”. O vetor deslocamento local para as imagens das partículas é determinado para cada área de interrogação através de métodos estatísticos – auto-correlação ou correlação cruzada. Assume-se que todas as partículas dentro de uma área de interrogação se movam de forma relativamente homogênea entre as áreas de interrogação da primeira e segunda imagem
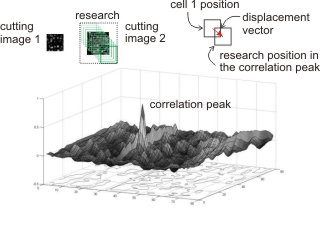
Aplicação
ds correlação cruzada normalizada em Velocimetria por Imagens
de Partículas.
a) Desenvolvimento do software de processamento de imagens utilizando a linguagem MatLab, tomando partido dos recursos matemáticos e de visualização proporcionados pela linguagem de programação;
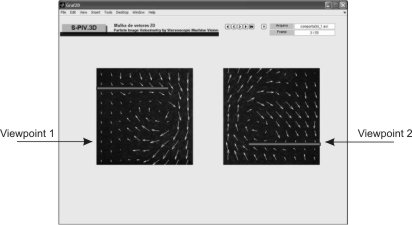
b) Para obtenção de dados tridimensionais, com a aquisição de imagens sob dois pontos de vista distintos, foi desenvolvido um estereoscópio ajustável que em conjunto com uma única câmera digital viabilizou a aquisição de imagens com os dados adequados para a definição tridimensional em determinada faixa de aplicações, dispensando dispositivos eletrônicos de sincronia utilizados em sistemas convencionais que usam duas ou mais câmeras;
c) Desenvolvimento do algoritmo e dos dispositivos de calibração do sistema de coordenadas, através do quais foi possível estabelecer a conversão das medidas obtidas nas imagens para as medidas reais, operar a correção da distorção óptica gerada na aquisição das imagens e proporcionar ampla liberdade na instalação e posicionamento dos dispositivos de produção e aquisição de imagens;
d) Utilização de uma iluminação por uma bateria de até 6 unidades laser industriais de 3mW com projeção de feixe em linha, de acordo com a necessidades de cobertura da região de medição e estabelecendo condições para aquisição de imagens em escoamentos de baixa velocidade, com custo reduzido de equipamentos e eliminação de pulsadores especiais;
e) O uso de uma câmera digital doméstica de alta definição como recurso colocado em prova para verificação da viabilidade de seu aproveitamento objetivando a obtenção de um protótipo de fácil instalação em qualquer laboratório de medição com finalidades básicas. Neste sentido verificou-se que este tipo de câmera pode atender uma ampla gama de aplicações proporcionando respostas satisfatórias em escoamentos de baixa turbulência.
Foi implantado um processo prático de calibração do sistema que se caracteriza pela liberdade de posicionamento dos dispositivos de aquisição e se fundamenta numa relação entre imagem obtida e objeto fotografado que se preserva durante a consecução de ensaios. Esta relação guarda fatores que englobam todas as variáveis que eventualmente poderiam influir na definição de valores. Através do processo de calibração pode-se posicionar os dispositivos livremente, sem preocupações com rigor geométrico de instalação, facilitando o posicionamento em relação ao campo a ser medido. A preocupação em relação à instalação se concerne apenas no devido enquadramento da cena pela câmera, no alinhamento das lâminas de laser com o alvo de calibração e a abrangência do iluminamento. A calibração dispensa introdução de correções devido à refração entre meios diferentes, engloba a distorção óptica do equipamento como também a perspectiva natural. A metodologia empregada na calibração compreende a aplicação de uma função de transformação ponto a ponto, isto é, existe uma solução otimizada para cada ponto da imagem que se pretende transformar para uma coordenada real. Esta relação entre imagem e objeto também inclui a conversão das medidas na imagem para as medidas reais levando-se em consideração todas as deformações peculiares do campo de visão natural e aquelas decorrentes das imperfeições ou distorções na aquisição de imagens por dispositivos CCD ou CMOS.
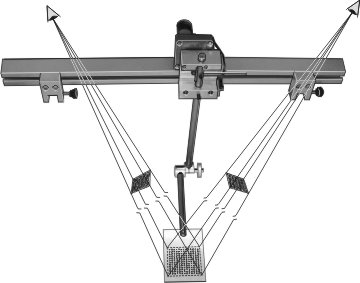
Dispositivo de calibração

Nesta aplicação a iluminação consistiu em projetar um feixe laser rasante sobre a superfície de forma a evidenciar partículas flutuantes e obter as imagens resultantes levando a alimentar o Sistema S-PIV 3D com dados para determinar o campo de velocidades para diferentes tipos de grade e níveis de oscilação.

Testes de medidas e visualização de escoamentos em torno de sólidos foram realizados em um equipamento especial: O Túnel Hidrocinemático. Neste equipamento são instalados modelos sólidos para interferência no escoamento e são procedidos diversos tipos de medições. Alguns exemplos são mostrados nas reproduções de resultados a seguir:

Os autores reconhecem agradecidamente o suporte do Conselho Nacional de Desenvolvimento Científico e Tecnológico - CNPq - Brasil
ALKISLAR,
B. M. KROTHAPALLI, A. LOURENÇO, L. M. (2003). Structure of a
screeching rectangular jet: a stereoscopic particle image velocimetry
study. Journal of Fluid Mechanics. Vol. 489, pp. 121-154.
CICCA, G. M. IUSO,G. SPAZZINI, P.G. ONORATO, M. (2002) Particle image
velocimetry investigation of a turbulent boundary layer manipulated
by spanwise wall oscillations. J. of F. Mechanics. Vol. 467, pp. 41-56.
DANTEC DYNAMICS (2005) Particle Image Velocimetry. Institutional Poster.
Skovlunde – Denmark: Dantec Dynamics A/S.
DONG, S. KARNIADAKIS, G. E. EKMEKCI, A. ROCKWELL D. (2006). A combined
direct numerical simulation–particle image velocimetry study of
the turbulent near wake. J. of Fluid Mechanics. Vol. 569, pp. 185-207.
ELSINGA, G.E. VAN OUDHEUSDEN, B.W. SCARANO, F. (2005a). The effect of
particle image blur on the correlation map and velocity measurement
in PIV. In: Optical Engineering and Instrumentation, SPIE Annual Meeting,
Paper 5880-37, 31 July - 4 August 2005, San Diego, California, USA,
14 pp
ELSINGA, G.E. VAN OUDHEUSDEN, B.W. SCARANO, F. (2005b). Assessment of
Tomo-PIV for three-dimensional flows. In: 6th International Symposium
on Particle Image Velocimetry. Pasadena, USA, September 21-23.
HOPFINGER, E. L. TOLY, J. A. (1976). Spacially decaying turbulence and
its relation to mixing across density interfaces. Journal of Fluid Mechanics.
pp. 155 – 175.
JANSEN, K. D. (2004). Flow Measurements. Journal of Brazilian Society
of Mechanics Science and Engineering. Vol. XXVI, N. 4. pp. 400 –
419.
LA VISION (2005). FlowMaster Advanced PIV/ PTV Systems for Quantitative
Flow Field Analysis. Goettingen/Germany: LaVision GmbH. 15 p.
OKAMOTO, K. NISHIO, S. KOBAYASHI, T. SAGA, T. TAKEHARA, K. (2000). Evaluation
of the 3D-PIV Standard Images - PIV-STD Project. Journal of Visualization.
Vol. 3, Nº 2, pp. 115-123.
PETRACCI, A. DOOME, C.W.H. WESTERWELL, J. LECORDIER, B. (2003) Analysis
of Stereoscopic PIV Measurements using Synthetic PIV Images. In EUROPIV-2
Workshop – Zaragoza, Spain. 11p.
PU, Y. MENG H. (2005). Four-dimensional dynamic flow measurement by
holographic particle image velocimetry. Applied Optics. Washington,
USA. Vol. 44, Issue 36, pp. 7697-7708
RAFFEL,
M. WILLERT, C. WERELEY, S. KOMPENHANS, J. (2007) Particle Image Velocimetry
– A Pratical Guide. Second Edition, New York: Springer Verlag.
448 p.
ROMA, W. N. L. (1988) Medida dos parâmetros
de turbulência superficial e sua interrelação com
o coeficiente de reaeração. Tese de Livre Docência.
Escola de Engenharia de São Carlos. São Carlos: EESC –
USP. 74p.
ROMA, W. N. L. (1995) Surface deformation measurement with optical sensor
and correlation with reaeration coefficient. In: International Simposium
on Air – Water Gas Transfer. Heildeberg, Germany.
SENGUPTA, T. K. LIM T. T., SAJJAN, S. V. GANESH, S. SORIA, J. (2007).
Accelerated flow past a symmetric aerofoil:experiments and computations.
J. of Fluid Mechanics.Vol. 591, pp. 255-288.
SMITH, B. L. GLEZER, A. (2002). Jet vectoring using synthetic jets.
J. of Fluid Mechanics. Vol. 458, pp. 1-34.
STEREOGRAPHICS CORPORATION. (1997) The StereoGraphics Developers’
Handbook. Beverly Hills – USA: StereoGraphics. 65p.
SZELIGA, M. R. ROMA, W. N. L. (2004). Sistema
de visão computacional para medição de turbulência
e correlação com a reaeração de corpos d’água
receptores. Engenharia Sanitária e Ambiental. Vol. 9 –
Nº 1 – jan/mar , pp. 30 – 44.
SZELIGA, M. R. ; ROMA, W. N. L. (2006). Machine Vision system for turbulence
measurement and correlation with the rearation of water bodies –
Computational Issues. In: CILAMCE 2006 - XXVII Iberian Latin American
Congress in Computational Methods in Engineering, Belém –
PA.
TAO, B. KATZ, J. MENEVEAU, C. (2002). C. Statistical geometry of subgrid-scale
stresses determined from holographic particle image velocimetry measurements.
Journal of Fluid Mechanics. Vol. 457, pp. 35-78.
THOMPSON, J. S.; TURNER, J. S. (1975). Mixing across
an interface due to turbulence generated by an oscillating grid. Journal
of Fluid Mechanics. Vol. 67: pp. 349 – 368.
URBAN, W. D. MUNGAL, M. G. Planar velocity measurements in compressible
mixing layers. Journal of Fluid Mechanics. Vol. 431, pp. 189-222.
YANG, Y. ROCKWELL, D. (2002). Wave interaction with a vertical cylinder:
spanwise flow patterns and loading. Journal of Fluid Mechanics. Vol.
460, pp. 93-129.
Algumas ilustrações mantém texto em inglês por terem sido elaboradas originalmente para publicação nesta lingua. Todas as ilustrações e textos contidos neste site estão a disposição para utilização com fins exclusivamente educacionais e desde que seja mencionada a fonte.
UEPG
- Ponta Grossa State University - Civil
Engineerig Department - Prof.Dr.
Marcos Rogério Szeliga
-------------------------------------------------------------------
2008 © WebSite by M.R.S. ------------------------------------------------------------
Key words:
PIV, Particle Image Velocimetry, Hydraulics, Fluid Mechanics, Fluid
Dinamics, Fluid Kinematics, Computational Vision, Flow Measurements,
Turbulence, Non-intrusive measurement methods, Laboratory facilities,
2D and 3D visualization techniques.
Palavras chave:
Velocimetria por Imagens de Partículas, Hidráulica, Mecânica
dos fluidos - Dinâmica - Cinemática, Visão Computacional,
Medições de escoamentos, Métodos não intrusivos,
Equipamentos de laboratório, Técnicas de visualização
2D e 3D.